|
前言: 今天我们学习STM32CubeMX串口的操作,以及HAL库串口的配置,我们会详细的讲解各个模块的使用和具体功能,并且基于HAL库实现Printf函数功能重定向,UART中断接收,本系列教程将HAL库与STM32CubeMX结合在一起讲解,使您可以更快速的学会各个模块的使用
# V) [. I5 n- H7 }% Y( P所用工具: 1、芯片: STM32F407ZET6 2、STM32CubeMx软件 3、IDE: MDK-Keil软件 4、STM32F1xx/STM32F4xxHAL库 5、串口: 使用USART1 PA9,PA10 知识概括: 通过本篇博客您将学到: STM32CubeMX创建串口例程 HAL库UATR函数库 重定义printf函数 HAL库,UART中断接收 HAL库UATR接收与发送例程 工程创建1 B) s: B' T- e% A- d, O t0 |
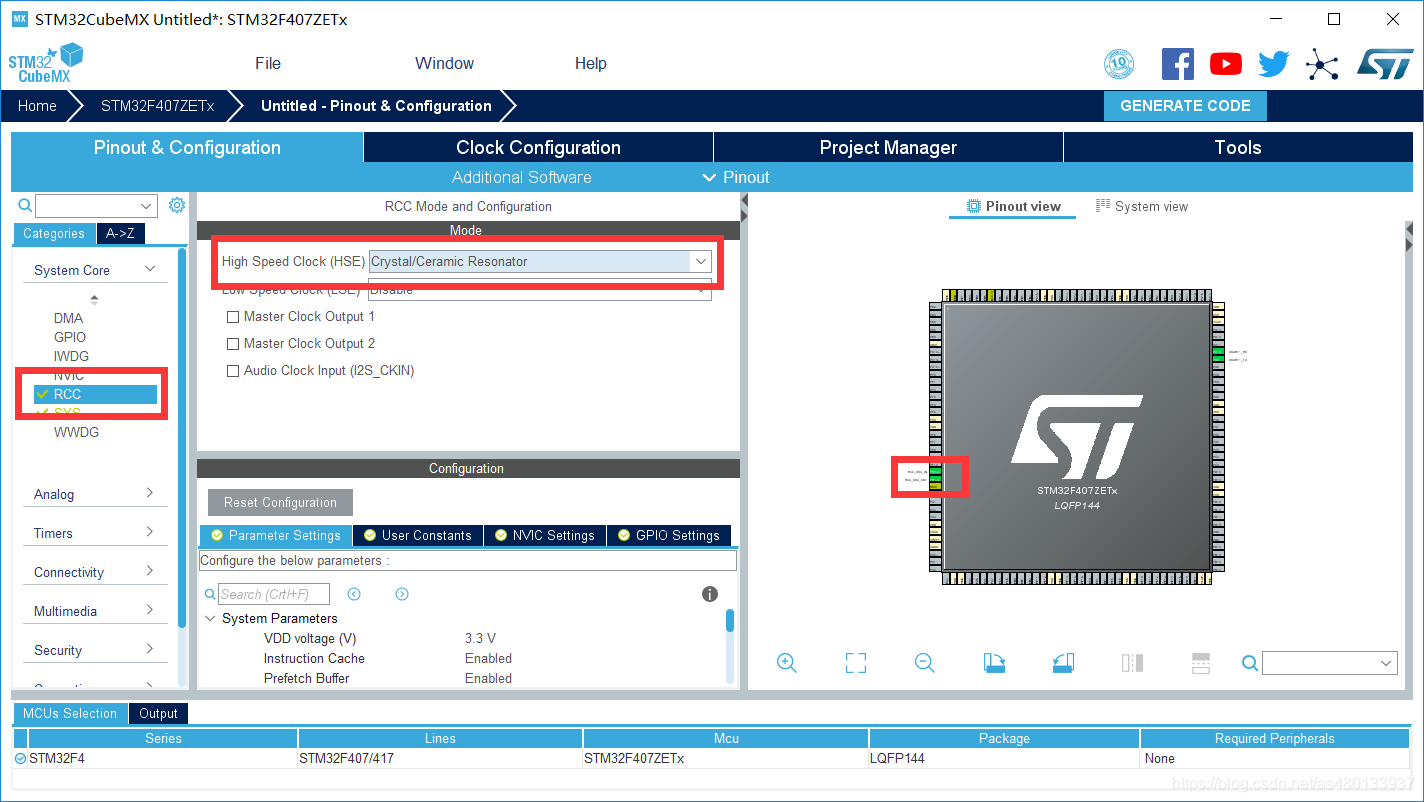
1设置RCC - 设置高速外部时钟HSE 选择外部时钟源) k' n6 O) E2 H$ [% Z" f. }
2设置串口 - 1点击USATR1
- 2设置MODE为异步通信(Asynchronous)
- 3基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1 接收和发送都使能
- 4GPIO引脚设置 USART1_RX/USART_TX
- 5 NVIC Settings 一栏使能接收中断
9 P+ n; W) [6 D/ P3 y- x
3设置时钟 我的是 外部晶振为8MHz - 1选择外部时钟HSE 8MHz
- 2PLL锁相环倍频72倍
- 3系统时钟来源选择为PLL
- 4设置APB1分频器为 /2
! A2 x0 Q) |3 f
: C) \+ i. H3 c7 _2 R* y! X
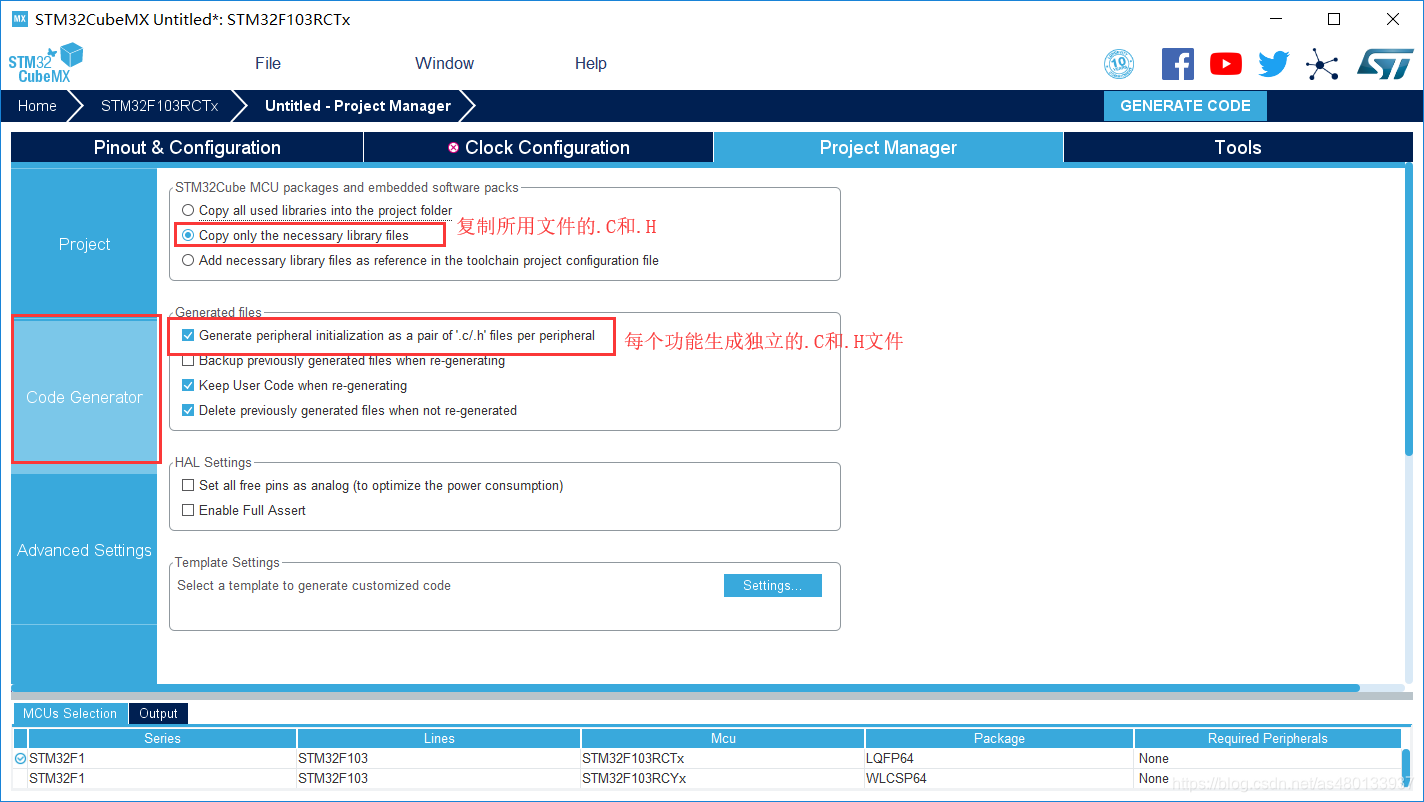
4项目文件设置 - 1 设置项目名称
- 2 设置存储路径
- 3 选择所用IDE! B4 a% W `1 k& W- u1 q% ^
5创建工程文件 然后点击GENERATE CODE 创建工程 配置下载工具新建的工程所有配置都是默认的 我们需要自行选择下载模式,勾选上下载后复位运行 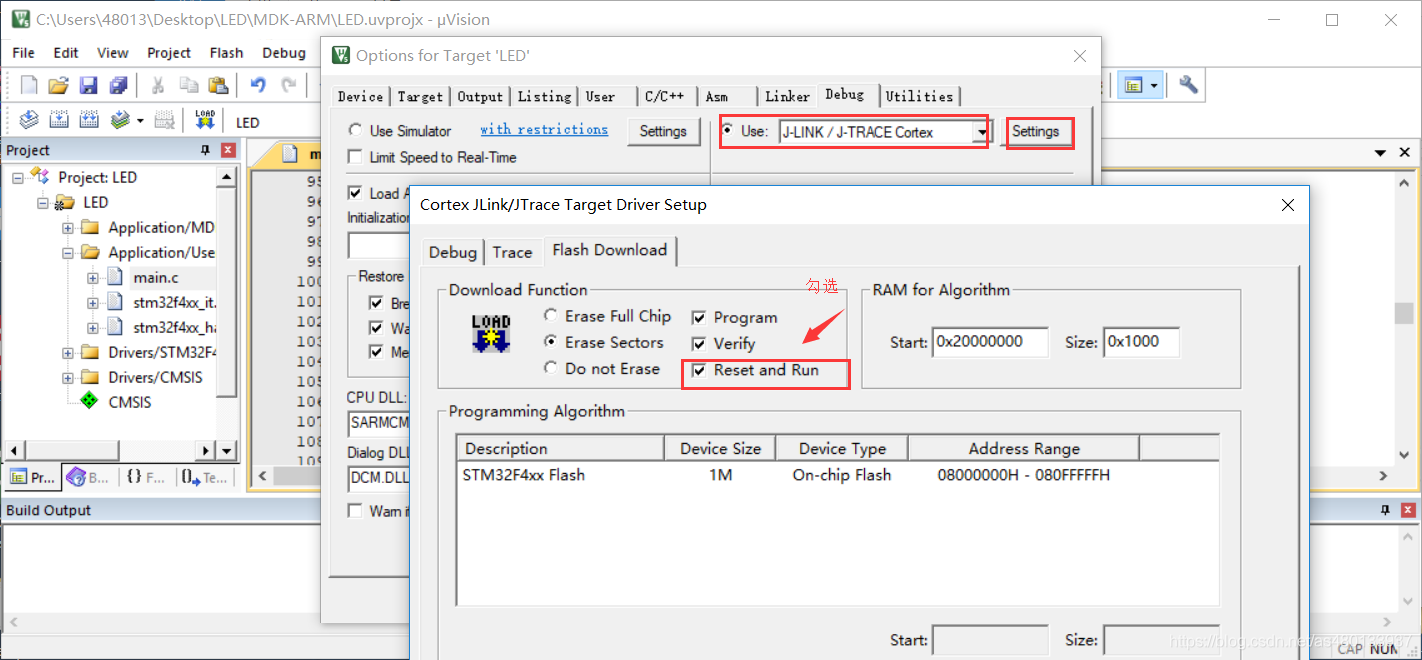 HAL库UART函数库介绍 HAL库UART函数库介绍
0 }+ X7 Q$ c* J) n" ] UART结构体定义 UART_HandleTypeDef huart1;
7 B, l3 X: w1 s- ~9 eUART的名称定义,这个结构体中存放了UART所有用到的功能,后面的别名就是我们所用的uart串口的别名,默认为huart1 可以自行修改 1、串口发送/接收函数 - HAL_UART_Transmit();串口发送数据,使用超时管理机制
- HAL_UART_Receive();串口接收数据,使用超时管理机制
- HAL_UART_Transmit_IT();串口中断模式发送
- HAL_UART_Receive_IT();串口中断模式接收
- HAL_UART_Transmit_DMA();串口DMA模式发送
- HAL_UART_Transmit_DMA();串口DMA模式接收- _9 v' y5 q0 M8 ~, ?/ ^
这几个函数的参数基本都是一样的,我们挑两个讲解一下 串口发送数据: HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
3 o. c& w; [- m4 q$ [功能:串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。 参数: - UART_HandleTypeDef *huart UATR的别名 如 : UART_HandleTypeDef huart1; 别名就是huart1
- *pData 需要发送的数据
- Size 发送的字节数
- Timeout 最大发送时间,发送数据超过该时间退出发送
8 \! s* ]6 p/ y7 h8 R
举例: HAL_UART_Transmit(&huart1, (uint8_t *)ZZX, 3, 0xffff); //串口发送三个字节数据,最大传输时间0xffff
: a6 \% f |% N+ ~9 U: N; Q中断接收数据: HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
0 n/ ?% h8 D! I9 a" W功能:串口中断接收,以中断方式接收指定长度数据。% ]/ L) N4 o& |! f, x
大致过程是,设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。3 ?5 p+ v3 ]$ l: U% b5 v$ h
再然后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断) 参数: - UART_HandleTypeDef *huart UATR的别名 如 : UART_HandleTypeDef huart1; 别名就是huart1
- *pData 接收到的数据存放地址
- Size 接收的字节数
1 f' n8 L9 s# X+ J
举例: HAL_UART_Receive_IT(&huart1,(uint8_t *)&value,1); //中断接收一个字符,存储到value中
* j! z+ Y8 \( @! Y+ ~2、串口中断函数
0 Y2 o; S& ? a6 t% B- HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数
- HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //串口发送中断回调函数
- HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //串口发送一半中断回调函数(用的较少)
- HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //串口接收中断回调函数
- HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart);//串口接收一半回调函数(用的较少)
- HAL_UART_ErrorCallback();串口接收错误函数
, B4 R8 j+ a* c
串口接收中断回调函数: HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
* W* k' J8 I$ J% |/ ?功能:HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码, 串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改, 参数: - UART_HandleTypeDef *huart UATR的别名 如 : UART_HandleTypeDef huart1; 别名就是huart12 W9 V7 i! B1 s4 j1 A5 D/ Z- G
举例: HAL_UART_RxCpltCallback(&huart1){ //用户设定的代码 }2 y# P6 Z0 a4 s9 S6 T( L! f5 w1 p
串口中断处理函数 HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
+ p1 u0 P! n/ s# G2 C功能:对接收到的数据进行判断和处理 判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用 2 v& o# ^, E6 O1 ~% x
如果接收数据,则会进行接收中断处理函数
: t" D. W, {% K* g
/ V8 N# j3 w$ [$ K# U/* UART in mode Receiver ---------------------------------------------------*/& D; j; S6 s% {5 a- [
) \: A7 P: d6 t5 p1 I1 W- : f$ x/ w4 s5 W9 P( N y2 t
2 `- o5 d4 [3 R9 Uif((tmp_flag != RESET) && (tmp_it_source != RESET))' l# T& T& n7 g
i8 ]0 ] P6 x# S% u, U
8 H8 M0 }- R V: X9 p8 _/ b. W7 i6 v, K* M: c* I* L" G. f$ N
{
8 S/ k, `/ B4 R# s3 P- A1 _' W w. U5 }5 e5 W; H
3 V6 ?+ a# Z- x: E* n. _/ ]- j- B) Q
UART_Receive_IT(huart);
' Z* ~. M. e' D! ^. e7 P: y5 P" r2 @8 o7 a. n' C
7 b5 O' v; O- C! ^ h3 J7 u
8 _4 K7 D7 r" X, E, b" T0 b! D8 ~: E}
* m; U; p# o- }2 {) P9 w7 x5 E# X8 x) m: C: ]% g d1 j# d- C" a
t, Z6 ]6 C( p
9 m/ X, l( J. l i% ^! ~如果发送数据,则会进行发送中断处理函数 - 9 s) n) ]0 ]# |; i( Y' U( }
( K1 l( B; Q/ N2 y+ Q& }7 e0 O! [8 d
/* UART in mode Transmitter ------------------------------------------------*/
7 B$ G! {! Z9 r( d. b" W$ m; |; }# k/ d# s7 e; ~0 H
- 0 G! t3 q, i+ S) k9 }- }* [$ |
5 R; M, `$ @. s7 j! ^7 b! }3 _if (((isrflags & USART_SR_TXE) != RESET) && ((cr1its & USART_CR1_TXEIE) != RESET))
2 Y% |* ~8 ~/ [7 A9 M! V8 S$ L5 F. `$ [& o* j9 m$ n+ s/ q+ a
- # r# I+ F) k9 k: |) p% y1 R$ T9 G7 K
A% ^ ?: w, R0 M5 ]{; t. Q. p0 j" K5 B7 k2 d
% _: d7 ?6 F% `* _0 s2 e, Q - ! b0 k# `7 S6 i2 y
7 T. N3 A8 J- L
UART_Transmit_IT(huart);, {/ ] B7 |6 D, Z& f" Z5 [7 t
# l7 p( u/ h$ c# [( K
- ( ~2 Q8 ?" ]: ~
. ^. x! Y* E, T; ~/ Mreturn;# E3 J: h' t7 J8 l7 v
2 {5 s# R: i" B/ o
8 ~6 A' u' `, h' c- I
, U. n- B. T: i' C6 D* d: \}
2 ~; x" h" b8 c
* p) k; \- X9 @' A4 `* L& p. R; @& E/ j( `! v
$ `0 A K- U U* [) M3串口查询函数 HAL_UART_GetState(); 判断UART的接收是否结束,或者发送数据是否忙碌 举例: while(HAL_UART_GetState(&huart4) == HAL_UART_STATE_BUSY_TX) //检测UART发送结束
2 j- O. j$ h3 f; }4 x
: j7 s+ V& K' {0 r: vUSART接收与发送6 q2 w1 g. c* I* G' Y$ X
重新定义printf函数- 在 stm32f4xx_hal.c中包含#include <stdio.h>/ ~& d# j( L1 [: x+ K1 C% ^. b
4 q# x- z% j, M9 J$ Y) R) t/ S& H4 [' T
#include"stm32f4xx_hal.h"
4 U! D Y4 b2 @9 ]
7 O, o' x1 s) H6 \- 0 W5 ~9 ?' P5 u6 b
2 S5 j! N! G" `% q: l#include<stdio.h>8 g/ |$ |3 Y& a( F6 M( B. W* m
0 u- O) I7 ]( _
- / L2 X. u" b6 v
6 A; `$ W% O, h% H: S8 F* }, w
extern UART_HandleTypeDef huart1; //声明串口. s' H9 y0 b$ Z7 c- h& E- Q
* x5 }" k+ m' Y* P7 V, w9 k
# g2 ]9 i' u K3 g4 c
1 c4 V E% b7 b+ M: m- 在 stm32f4xx_hal.c 中重写fget和fput函数
- /**
! K, _0 }2 J' I7 Z( Z: w# K- k在main.c中添加
( S& Q9 B7 _9 j
- 0 f% Z" E8 T$ T0 [6 \3 \
[8 @3 W" B% x* _/ w* q7 E4 K #define RXBUFFERSIZE 256) P7 I9 D# j/ n
, j' L0 v) z( s* d' |
- 5 W- G& k( C% L
7 |1 m& J) f% q1 v; {char RxBuffer[RXBUFFERSIZE]; * s4 s7 F0 U& L k0 p3 M' j4 L7 [
v2 c" W5 ?& V) y/ l& B9 t/ @
% }2 s6 c) V7 ^" W
- }& ]5 p3 n$ h+ f
; s; [7 }) z3 P o2 w: F M
! S1 S. [) p A3 C, h {; W: g0 j% X: f
$ X$ N; T! N( r/ |, V2 }+ Y
n1 q% p6 }8 J+ ^9 \! [/ y2 ~/ x7 M) E6 q' Q" |) W
while (1)) y, x1 Q L4 \# i' v% W
0 `( _ O& n- O* r- 3 ?% {, G! E! Q* f, @/ f
, y6 [8 f& v" J# R; t/ E4 ] @{- z C. A$ h9 v7 o, s* H$ O+ w
) q1 l. H4 `# f+ i1 w& M
$ I1 ]8 I' i) f4 c4 m+ |
# @8 |7 @; |0 ?6 ^( F! `% }# W2 X5 \/* USER CODE END WHILE */
# G; q3 D9 I5 o
3 b1 u! C1 I* O x: @
5 u! l1 }9 }* t( @, `* O0 R* a1 ?, n: N0 u" O8 Y: i8 f' e
printf("Z小旋测试\n");! `+ v$ Q; [1 z/ U
9 X: h4 q. U) M1 B8 P1 O1 m
! r, _# ^" F- C' v0 x
# j' h9 C2 m7 \. GHAL_Delay(1000);
0 U p; [: C7 l) @) e( N
1 M% C+ D9 `8 E$ r) A( K. r
# I7 ?( w2 C6 s: L n3 x
; p% \2 n- y( ^8 e/* USER CODE BEGIN 3 */
7 U! `* d E4 o/ M! V5 H q; |$ O+ |! K, c4 m- S
- $ }$ S/ O9 R5 Z
, }0 e* v) J( ~& t
}5 m9 B/ d5 n6 X) O: |- |
* c" T: _5 ~5 M0 v; Z) [
3 x# r3 J' Y& ^: m
2 q. k T Z8 v# |% x之后便可以使用Printf函数和Scanf,getchar函数 UART接收中断因为中断接收函数只能触发一次接收中断,所以我们需要在中断回调函数中再调用一次中断接收函数 具体流程:1、初始化串口 2、在main中第一次调用接收中断函数 3、进入接收中断,接收完数据 进入中断回调函数 4、修改HAL_UART_RxCpltCallback中断回调函数,处理接收的数据, 5 回调函数中要调用一次HAL_UART_Receive_IT函数,使得程序可以重新触发接收中断 函数流程图: HAL_UART_Receive_IT(中断接收函数) -> USART2_IRQHandler(void)(中断服务函数) -> HAL_UART_IRQHandler(UART_HandleTypeDef *huart)(中断处理函数) -> UART_Receive_IT(UART_HandleTypeDef *huart) (接收函数) -> HAL_UART_RxCpltCallback(huart);(中断回调函数) HAL_UART_RxCpltCallback函数就是用户要重写在main.c里的回调函数。 代码实现: 并在main.c中添加下列定义: - / ?' m* u( R( Z4 j& ?! v9 J5 s, o
" }' f8 R$ M3 U& `" h" j% a* P2 T" I0 ?#include<string.h>0 Y8 q4 m3 z( e
0 o7 H0 F* Q! O2 z - 2 ]! T% K* L" L
& Z( b4 m( U! p6 P* f$ J
& A! _- b4 W% K9 M! i- r: Q0 d2 a8 z4 i' x
0 T) o0 V2 V# ^2 T5 O2 W+ D' S3 j+ s+ ~ }8 ?$ J6 l
#define RXBUFFERSIZE 256 //最大接收字节数+ w+ h! ^( @& Y7 J5 W' o
& ~+ s: C0 F: ^% x3 A. b1 m+ o
- & Y3 G$ n" K& _ E- X; E$ K
7 W5 m' F: A# D1 S9 s) j2 U9 U# lchar RxBuffer[RXBUFFERSIZE]; //接收数据0 E" W! x+ \5 E2 E: \0 S% U% I# ^, X; ^
8 b0 c H6 w- g3 ^! i% v - ) o! X1 Y V) o7 |2 x
8 `/ x& @ g0 L4 E) ouint8_t aRxBuffer; //接收中断缓冲. B D7 A2 K, o' e
& M6 k/ \$ x$ i - 8 S7 @) q1 {% L; R& o
5 L- H8 A6 k: T; {! {" k, ]
uint8_t Uart1_Rx_Cnt = 0; //接收缓冲计数: w5 |* r# Q9 N. W6 k# |* n
2 |% j, w& W8 d" E$ d7 w3 r' T
[& _; }, A2 n
( v1 W7 ]! L/ u% b6 `7 v a8 L; P9 Y% v9 s
在main()主函数中,调用一次接收中断函数 - 1 |( j' j9 Z" W; r' } z1 S& v
- ^3 f) c( q( K0 A0 Z$ w/* USER CODE BEGIN 2 */& p8 b# e, y/ w
; J* A8 M( A& @0 J5 [ o1 x
% M3 T& s) a4 [$ F1 x9 e: [2 M9 }3 v" d# `, F+ O
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);9 c3 g: v. ^ T( k) G& X
6 ~+ t4 o! i+ z( @! U
- 4 ^3 ~2 `& a) z
9 n: z1 N' c$ Y! `4 s$ F% { V/* USER CODE END 2 */
) I8 c8 N$ w+ Q: m) x/ D
/ O1 \: {; A% e0 F; V! L, U2 l( l8 G
4 C% A& ~( T) u. {在main.c下方添加中断回调函数 - 6 \- b3 l; ]6 H" a1 D9 Z. ~4 h
; a! Q2 c4 f( p: t; S. ~7 X G/* USER CODE BEGIN 4 */8 F9 c2 o4 R2 s$ ^8 X
% w# v: Z+ g% h: M& N3 z% y, `: m - 3 k8 w/ b5 O0 Q/ u9 I0 X, J- ]: l
" P! a9 M; P% T, m3 p
4 X4 X' M! l: D/ ]! |+ [& m% m% R7 Q# [2 A! x. N
# c6 v" M. z; H" Q2 D+ n* K K; r2 |- s$ k! N1 ]- [4 x8 z! p8 @8 K2 U& P
voidHAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
/ ^4 r L8 h! n, ~! S0 ?" {( c* c- ?0 l% _5 H3 k; S
- * u9 I$ n F4 k
" k$ e/ V" h- n: d{
$ }& w1 U( _ i+ X
9 a; |" R, z0 Q3 J1 r
6 Y4 Q6 `% z9 M& L
) g; s: T. |" [ g6 s! d7 a/ o- P/* Prevent unused argument(s) compilation warning */
7 D+ m W+ @+ u; Z3 n. o7 E; t
. m7 n/ m! m7 b9 W9 K4 s
7 m, B/ D( C c* }" N* S' g' Q% ^
( r+ d6 Q0 X m& M6 GUNUSED(huart);% x5 W2 h' v/ o2 c4 H4 F) A+ l
; D1 Q6 m$ n: J% M+ |
/ ]' i5 @" U& }; f0 G f- {# U8 u$ S$ {. d( D2 i- `5 t
/* NOTE: This function Should not be modified, when the callback is needed,; S- t9 r) `/ k1 g/ F3 u$ K- D' X7 y
6 u6 c* I( Y" ~' i
* _# v9 _7 ^( e; _( X7 ]1 t0 W6 ~; u8 c6 `, O3 z6 J0 N
the HAL_UART_TxCpltCallback could be implemented in the user file
0 p. }6 M# D2 z6 E& X
7 u0 y; m! x$ D' Z! J- ) h I. |6 S% b0 k- m
1 _1 C0 ]/ W8 w*/
' c+ k5 Q6 p7 M! b
. g! [3 @6 c2 Z3 b - % J4 Q7 H7 o$ _7 k1 z, H8 `+ d4 o( n
, C3 m8 E2 o Z. c2 i
8 f. S1 Y2 \: q7 w
( b9 _9 e4 ^- P% @+ B
0 U3 u" T; Q- G' r O
4 B4 K- D9 w1 x% a" m9 Mif(Uart1_Rx_Cnt >= 255) //溢出判断
% S/ _3 O7 M( ^: E1 D* F( F: i6 x# k. Q
& E3 d4 U8 [! Q! y6 l
; |3 ~) c, h; q$ D% y; h{5 @6 i5 K1 V0 G; t( {' S
U2 u9 P/ N! w3 ~% H$ Y& M! ^& ~$ ]
; i- w0 L4 S2 b( M7 X3 t$ @1 q5 k
Uart1_Rx_Cnt = 0;
6 ~: T5 Y6 J: v/ P7 P4 P; G K. I# s# G# q# M6 r
9 j' B0 _" A0 l1 W# @! M( T' \# m+ X$ c. n$ J* i, n( `) Y0 X* k
memset(RxBuffer,0x00,sizeof(RxBuffer));
5 U, m4 \( p3 M0 |; \& @
! [9 [* D# c7 b8 q+ T' Z5 x r
5 G. d& e ?$ h4 L6 I2 o' b, X- q) `( s* w) [ y
HAL_UART_Transmit(&huart1, (uint8_t *)"数据溢出", 10,0xFFFF);/ i6 U; r0 f2 g5 p
S/ @$ e( f6 ], ~3 ^
6 o O! b) t" s8 F* C
9 Z1 i% X7 p+ V6 h4 v
- E2 a/ q5 ], N$ G+ N$ w% T. @% a# p4 h( X4 |( {
1 Y! o6 {+ V h7 e3 P2 j: U. i& O3 A8 s/ H5 q
}
* ^1 x2 l( T& m
4 e h0 W+ A9 i1 J" _- F- * ^3 i& j( p! d/ Y5 D) m, i8 d( t
: O3 s: \0 K+ b# J
else
7 P$ v6 y3 b6 w8 O5 O, A- ?: w' f/ D+ a
, L6 M+ K. L# X* E: e; P+ E( A. {
! x, V+ ~7 c3 ~4 \{
3 K! H6 V v% Q( j0 M# }- u6 A# d o; u) [( M3 G" F$ M8 O8 U
- : _4 Q- `9 H% [6 h
% o$ Q, y! R# ~2 v
RxBuffer[Uart1_Rx_Cnt++] = aRxBuffer; //接收数据转存$ P# u+ A0 k/ ^. A
6 L" m) f8 L( J# |
- $ n" j8 ? f5 P; B. T! [, O6 S. D3 r p
+ y6 e# q8 O. g6 e. y) o
8 S' g% Q4 m; p9 i/ u2 d6 n% V4 f! p ~4 P1 w) h- r s. e5 T
6 {, y# `! X ^8 t
. \6 S& l$ s+ [4 `if((RxBuffer[Uart1_Rx_Cnt-1] == 0x0A)&&(RxBuffer[Uart1_Rx_Cnt-2] == 0x0D)) //判断结束位+ g0 \" z% ~- r5 E
* g2 D5 J! [: U; n
' y. g( T9 X% x
$ o( i, T; f& P! b# x j{
" t+ ]9 f4 o( y$ \4 y+ @
/ _6 Y: I# ^! a. g0 H. p9 f' X- - H& a) b; U$ O" |+ A( d7 n. `. h
+ Q3 a$ x/ _* U- ]: aHAL_UART_Transmit(&huart1, (uint8_t *)&RxBuffer, Uart1_Rx_Cnt,0xFFFF); //将收到的信息发送出去3 Y4 Y3 K* J2 r* ^& x- A
" w' { J9 \: O5 D
- 2 i5 S1 G/ [! v6 i! E
) B* w& ~; c' e9 t F$ vwhile(HAL_UART_GetState(&huart1) == HAL_UART_STATE_BUSY_TX);//检测UART发送结束
. M1 Q4 D; }% ~4 e/ [2 h; j) J+ m k; g1 T
- - V1 B& Z& p) k& {. K
8 ^4 z8 z: j# w, T& C+ `0 n! |Uart1_Rx_Cnt = 0;- F- g1 m- W. ?$ L% @
6 F3 ]: m7 ]3 e0 n1 F! w6 ?3 q
9 |6 b, C: ^0 E8 n8 Z
* ]) M* P# R+ r- W0 C; s7 vmemset(RxBuffer,0x00,sizeof(RxBuffer)); //清空数组3 g* p0 B$ Z" |5 J( J( I
: ^' r3 n, D. y- @0 k
- ! ~& g2 V/ l& F' W. V! Z9 ^0 n! F
! `0 J! Z& p% _% i8 j}5 y7 s% Z8 N9 o- ?
1 h; D3 S, W3 b: J" k! K( g
/ T% O3 W* E: d! O- t9 h! t* f0 m! w! U0 O
}
+ u5 ?2 d. z1 A/ g
" c. C* L# ^( s& j/ A. p0 |- 9 M' i6 L8 D3 B; u% @6 F& ?! m
4 B4 c& g B u& [' n
) Z. R+ a4 M9 ?; }4 G( ]5 ~$ @
) N* e% K, @0 g/ l7 t# W
2 x8 J- G# }9 L
6 W' H4 f [% x7 n0 y/ D/ ^HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1); //再开启接收中断
: m8 ~8 j) X$ E2 H% ?/ v. e: ?& W j! f1 ?
# b$ {; q, A- o
3 }. l9 R6 y; [5 X+ l% u2 F}
* \$ M0 N; k: v2 d. K4 G7 l; C1 h1 @/ }5 O+ H
5 d0 a @ L( J! i) m. l* M- {0 G4 Z6 _8 i+ _+ s' q
/* USER CODE END 4 */- ~" Q5 Y& E! p8 K6 K+ c3 x
8 \ K1 v* ~* L# W! P+ B1 ?: U) c: D( ~4 p$ p
% A, S; G- I1 F3 R3 z
发送数据被正常返回
5 f5 X1 }/ S2 Z
+ r3 Z4 J% R# ~$ s* H7 c C+ i% [ |